Abstract:
Unmanned Aircraft Systems (UASs) are technologically advancing at such a rapid pace that domain experts are now highly concerned of the potential misuse of the technology that can be used for unlawful actions with detrimental effects. The most effective measure to counteract the operation of rogue drones are electronic anti-drone systems that in one way or another intercept the normal operation of a rogue agent. In this work we develop an intelligent pursuer drone that implements novel lightweight functions to meet all necessary interception steps (i.e., detection, tracking and interception) in addition to self-localizing using signals of opportunity in order to maintain perception when performing wireless jamming against a rogue drone.
Introduction
Unmanned Aircraft Systems (UASs) have attracted enormous interest from both the scientific and industrial community due to their potential transformative effect for a great number of application scenarios. Based on the latest figures on UAS-related technology, consumer-drone demand will increase sharply over the next few years with the global market for drone technology reaching 43.1B$ by 2024.
However, the increasing improvement of UAS capabilities with higher levels of intelligence and autonomous features can also potentially introduce new threats to public spaces and critical infrastructures. The anonymous and uncontrolled purchase and use of drone platforms has led to the need for technology-specific security systems to counter potentially malicious actions.
Importantly, there are no sufficient solutions to date to effectively detect, track, and intercept rogue drones in a safe manner. The research community has concentrated on innovative detection techniques, such as RF signal sniffing, sensors, and computer vision. In addition, interception techniques include net-casting, RF denial systems, and high-power lasers. Nevertheless, substantial further work is required for effective UAS interception solutions.
Safety for critical infrastructure systems is crucial as indicated in the recent drone incidents at London’s Gatwick and Heathrow airports, where drones flew over restricted airspace, presumably targeting the interruption of air traffic. In those incidents, British police successfully countered the drones, by using wireless jamming to block the UASs’ remote control functionality. Jamming is the most effective interception method. However, the use of wireless jamming over extended ranges may severely affect normal operation of systems that depend on such signals as recently highlighted by the Federal Aviation Administration (FAA).
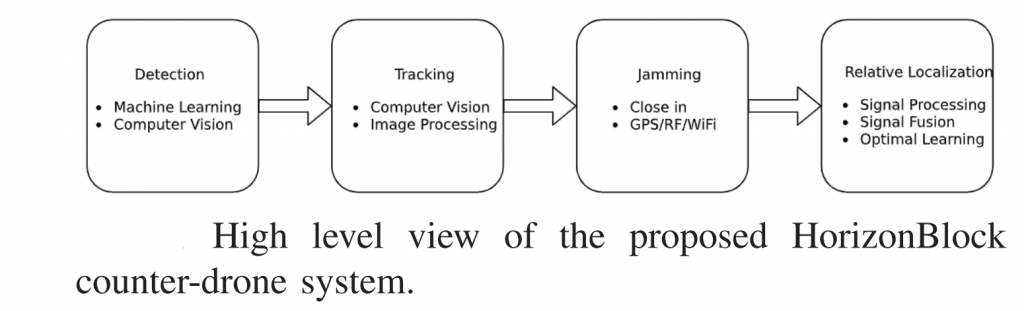
In accordance, this work proposes a fully autonomous aerial counter-drone system which is used to detect, track, and jam a rogue drone. Upon alerted of the target, the counter-drone system takes-off with the aim of detecting and tracking the rogue drone before intercepting its operation via wireless jamming. Importantly, and to maintain navigation in space, the pursuer drone self-localizes using a novel technique based on signals of opportunity as it will be discussed in Section V. Figure 1 depicts the high-level process of our proposed system to aid understanding.
The rest of this work is structured as follows. Related work is included in Section II and details of the four system components that comprise the proposed HorizonBlock counter-drone system are included in Section III, Section IV, and Section V, respectively. Section VI elaborates on implementation and integration aspects of the proposed system and details prototype tests. Concluding remarks regarding this work are presented in Section VII.