Abstract:
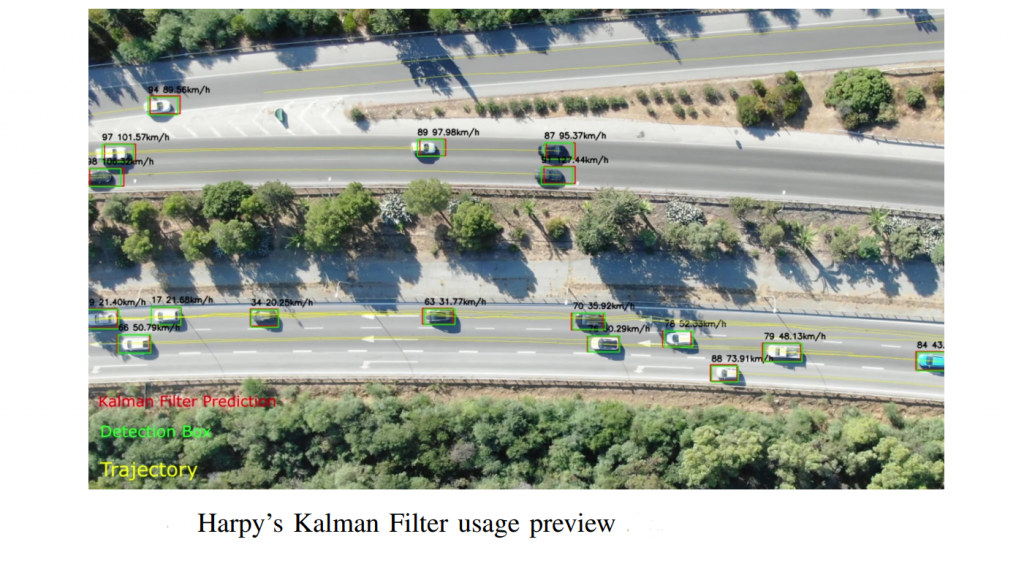
Efficient traffic monitoring is playing a fundamental role in successfully tackling congestion in transportation networks. Congestion is strongly correlated with two measurable characteristics, the demand and the network density that impact the overall system behavior. At large, this system behavior is characterized through the fundamental diagram of a road segment, a region or the network. In this paper we devise an innovative way to obtain the fundamental diagram through aerial footage obtained from drone platforms. The derived methodology consists of 3 phases: vehicle detection, vehicle tracking and traffic state estimation. We elaborate on the algorithms developed for each of the 3 phases and demonstrate the applicability of the results in a real-world setting.
Introduction
Drones or Unnamed Aerial Vehicles (UAVs) have a broad range of applications ranging from remote sensing to deliveries. They have also become so affordable that they are on a course to transform domains where infrastructure inspection and monitoring in crucial, including of course road traffic monitoring.
The great advantage of UAVs in road traffic monitoring is that they can capture footage over large areas from which novel information can be extracted. Unlike localize information from loop detectors and static cameras, processed UAV footage can reveal mobility and speed patterns over distances and time periods long enough that the underlying speed-flow-density relationship of lines, road segments and regions can be revealed. More specifically, this speed-flow-density information can be used to extract the fundamental diagram (i.e., the relationship between the traffic flux and the traffic density (vehicles per hour to vehicles per kilometres). It is well know in the transportation research community that this diagram reflects on the macroscopic effects of traffic flux, velocity and density and it often used for predicting the characteristics of the road system behaviour. Moreover, using the fundamental diagram (FD), traffic control can be applied, such as increasing the road infrastructure at highly congested regions or more favourably apply intelligent traffic light policies and novel traffic managements schemes as suggested in and looked at in.
In this paper we elaborate on how the FD can be extracted from video footage collated by UAV platforms through a pipeline of image processing, vehicle tracking and finally, traffic state estimation. Thereafter an example case study will be presented where the pipeline has been implemented and validated using collected GPS traces as well as OBD (Onboard Diagnostic unit) measurements.
The rest of the paper is structured as follows. Section II includes related work and demonstrates our contributions with respect to the state-of-the-art. Section III provides a detailed derivation of our proposed pipeline and Section IV provides an experimental evaluation of this pipeline. Finally Section V concludes with key findings and future research avenues
IEEE Publication,
arXiv Publication