Abstract:
Power transmission and distribution networks mostly span across harsh environments and thus, frequent faults and failures are observed, increasing the maintenance costs, pressing the authorities to provide electricity continuously and uninterruptedly. To this end, thorough field inspections with skilled personnel are regularly conducted, which are labor-intensive, costly and slow, whereby efficiency and staff safety cannot be always ensured. UAVs stem as a promising solution for power infrastructure inspection; however, their use is mostly limited by the fact that a remote pilot is in control of flight and mission processes, rendering reliable data acquisition in short time interval a tedious task. Despite research efforts for automating inspection procedures, these have not been widely adopted. In this study, we address this challenge by developing a Power Distribution Network Inspection Platform Using UAVs (ICARUS), based on a vision-based artificial intelligence toolkit, that integrates multiple sensors and automates many tasks, such as detection, tracking and identification of infrastructure components, gathering reliable spatial/time data associated to these components autonomously, safely and fast.
Introduction:
The heavy dependence of societies on electricity puts pressure on Electricity Authorities (EAs) for covering the increasing demands. To this end, power transmission and distribution networks are operated, including high voltage (HV), medium voltage (MV) and low voltage networks, which mostly span across harsh environments and are frequently exposed to extreme weather conditions. In the majority of cases, power infrastructure is aged, inevitably leading to degradation, which in turn may cause fires and power outages. In the latter case, it has been estimated that half-hour and eight-hour blackouts in the US resulted in an average loss of about 16,000and94,000, respectively, while for some sectors, e.g. financial, the costs may reach the order of millions. Finally, in an interconnected power grid, a local power outage is also likely to initiate a domino effect, affecting other regions as well.
To mitigate these effects, EAs proactively conduct thorough routine inspections with skilled personnel, which are dispatched across the power infrastructure either on foot or with helicopters. Inspectors visually assess the condition of power components, by primarily employing binoculars and less frequently dedicated cameras to detect specific conditions, such as increased temperatures and corona effects. While this inspection approach has been mainly applied worldwide, there are pros and cons of these methodologies, i.e. patrol vs. helicopter-based. The former allows for longer evaluation times; thus, increasing detection rates at the cost for shorter network coverage, while the latter allows the inspection of a larger portion of the network, due to the increased speed, at the cost of lower detection rates. Both approaches are potentially dangerous for the staff, require skilled personnel, i.e. for inspecting the network and for flying helicopters, while efficiency depends on the observation skills of the inspectors and fatigue levels.
In this context, UAVs stem as a promising and flexible solution for power infrastructure inspection, due to their inherent capability of providing high-quality data of power components, by being able to carry high-end cameras and to fly close to power lines. Moreover, the associated operating costs are significantly lower compared to conventional helicopter-based approaches. While the concept of using UAVs for power infrastructure inspection dates back almost 20 years ago, significant attention has been given the last years, due to advances in UAV technology and their widespread commercial availability. Of particular interest is to build automatic and/or autonomous systems, with the ability to acquire data using multiple sensors, for better identifying defects in the network; however, such attempts had so far limited applicability. These efforts are mainly constrained by the fact that a remote pilot is still in control of flight processes, e.g. data acquisition, by the ability to attach multiple payloads on the UAV, by computational limitations for real-time data processing, and by the large navigation and positioning error associated with a single Global Navigation Satellite System (GNSS), e.g. GPS.
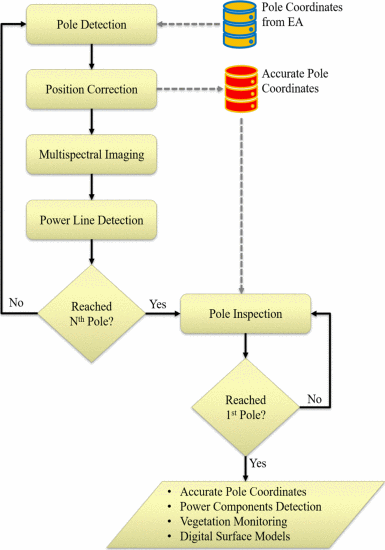
In this study, we capitalize on recent advances in UAV technology and embedded hardware to develop ICARUS; a UAV-based platform which automates the inspection of power infrastructure network, both during data acquisition and analysis. With ICARUS, multiple sensors are integrated on the UAV, which is programmed to autonomously acquire data for mapping and identifying degradation conditions of the power distribution network. The developed system employs a hybrid navigation approach using multi-frequency and multi-constellation GNSSs to minimize navigation error, as well as deep learning algorithms for data analysis. Specifically, the employed UAV is equipped with an onboard embedded platform, which is responsible for real-time data processing to identify poles and record their accurate positions, since these are not precisely known. During inspection, ICARUS gathers data, which are subsequently processed with dedicated algorithms to identify insulators and their condition, to identify obstacles and assess vegetation near the power line corridor, to detect power lines, as well as to generate digital surface models.