Abstract:
Recent advances in mobile computing and embedded systems have had a transformative impact in the field of Unmanned Aircraft Systems (UASs). These advances have unlocked a great number of new capabilities ranging from realtime machine learning for detection and tracking of targets, and autonomous intelligent control for mission-critical trajectory planning. This paper introduces Hyperion, a robust detect, track and follow algorithm for UASs, leveraging and integrating various computer vision techniques and a combination of two proportional integral derivative (PID) controllers for following a moving vehicle. The proposed system is evaluated under real settings using off-the-shelf hardware and an elaborated comparison is made with a variety of state-of-the-art trackers available in the OpenCV library.
Introduction:
As Unmanned Aircraft Systems (UASs) continue to evolve in aspects such us affordability, maneuverability and autonomy, their use in law enforcement and public safety applications will increasingly become more appealing. Moreover, advancements in small form-factor processing units for use in embedded systems and specifically for edge computing applications, have made a huge leap in regards to the processing power, footprint and power consumption requirements and thus their use in UAS solutions has opened up a vast array of applications. Based on recent market analysis on the use of UAS, law enforcement agencies have already taken advantage of such technologies with use cases varying from surveilling open areas or monitoring critical infrastructures to pursuing armed suspects and vehicles. This has driven the UAS market which is estimated to hit $63.6 Billion by 2025 with shipments hitting 29 Million units by the end of 2021.
Hence effective and efficient use of the increasing UAS capabilities requires higher levels of automation and intelligent algorithmic features. For instance, even though UAS are currently being used for pursuing vehicles in urban and rural areas, they are most often remote-controlled in a manual fashion. Manually controlling a UAS requires the full attention from the remote-pilots and thus, demanding significantly more resources during a mission and increases the risk of the operation.
To date, there is a very limited number of solutions that effectively detect, track and follow moving targets (e.g. a vehicle) in urban and rural areas. Following a moving vehicle, for example, demands flexible aerial maneuvering and hovering in mid air. Multicopters that share most of their maneuverability capabilities with traditional helicopters, are able to perform such movements skilfully in comparison to fixed-wing UASs that are generally significantly less agile. Moreover, effective detection and tracking is possible due to the recent advancements in embedded systems technology. Nowadays, small scale processing units can be embedded on various UASs without compromising the maneuverability nor the operational flight time of the UAS. By utilizing such devices, one can harness the capability of real-time image processing with minimal impact of flyability. In addition, having an embedded device that is capable of real-time processing, enables the system to function in a fully autonomous way.
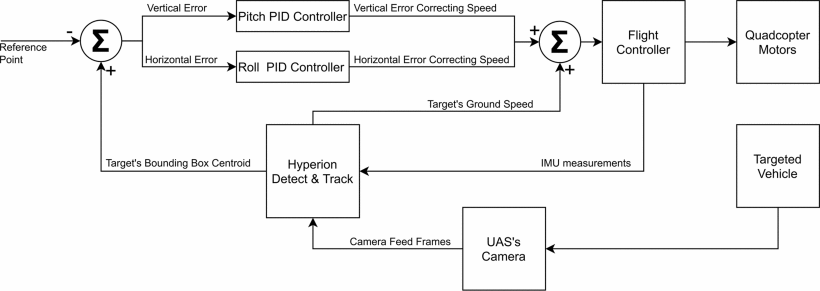
In accordance, this work proposes Hyperion, a fully autonomous aerial system which is used to detect, track, and follow a moving vehicle. We assume that as soon as a UAS is in the air, detection of vehicles within the Field of View (FoV) of the onboard camera commences. Once a target has been selected from the Ground Station (GS), Hyperion starts tracking the moving vehicle and tries to vertically position the UAS above the target (i.e., aiming to always have the target within the center of the FoV). We assume that the quadcopter always faces to the North and follows the moving vehicle by applying controls to the roll and pitch axis only. This is done to keep the quadcopter in the same orientation at any given time so that a remote pilot can easily intervene and regain remote-control of the aircraft without loosing his orientation.
The rest of this work is structured as follows. Related work is included in Section II and details of the subsystem components that comprise the proposed Hyperion system are included in Section III. Section IV elaborates on the implementation and integration aspects of the proposed system. Details about the prototype tests and an evaluation of the results are discussed in Section V. Concluding remarks regarding this work are presented in Section VI.